How can you make your studies more interactive?

Noskovtools contains study materials and examples of solving engineering tasks, which you can execute in Dysolve Math solver app and get an interactive calculation worksheet with results.
See how you can do it in three steps:
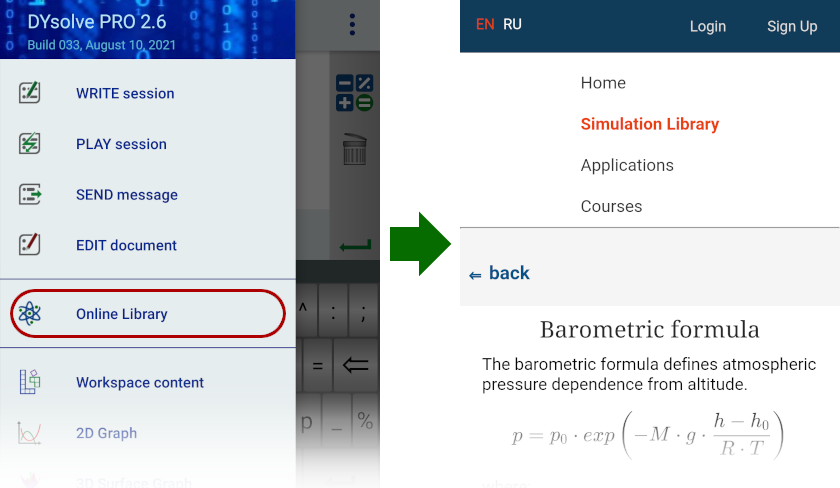
1. Download Dysolve Math solver app, choose the article of interest from the Library.

2. Press Execute button, go back to the app.

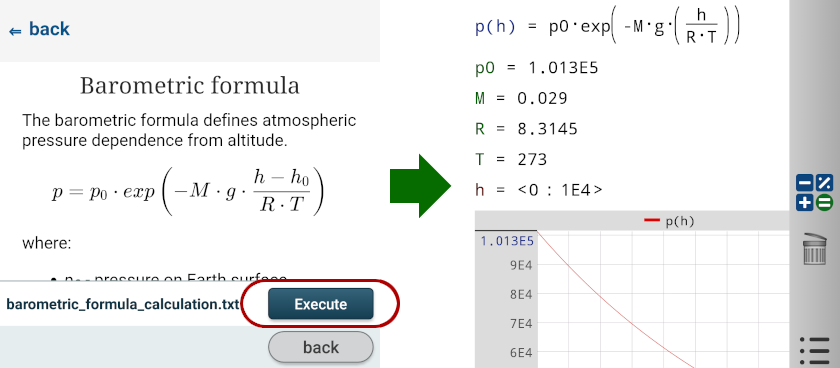
3. Adjust inputs for your case and enjoy results!